Week 10
VL 19 - 17.06.25
Complexity / Depth of Anderson Trees (“AA-Tree”)
properties of anderson trees:
- 0: search-tree condition
- 1-3: horizontal edges
- 4: all nodes that are not at the lowest level, i.e. not the smallest sentinel distance, have exactly two children
Main point idea of Anderson: 0-4 are by appropriate impelemntation of insert and remove always satisfiable.
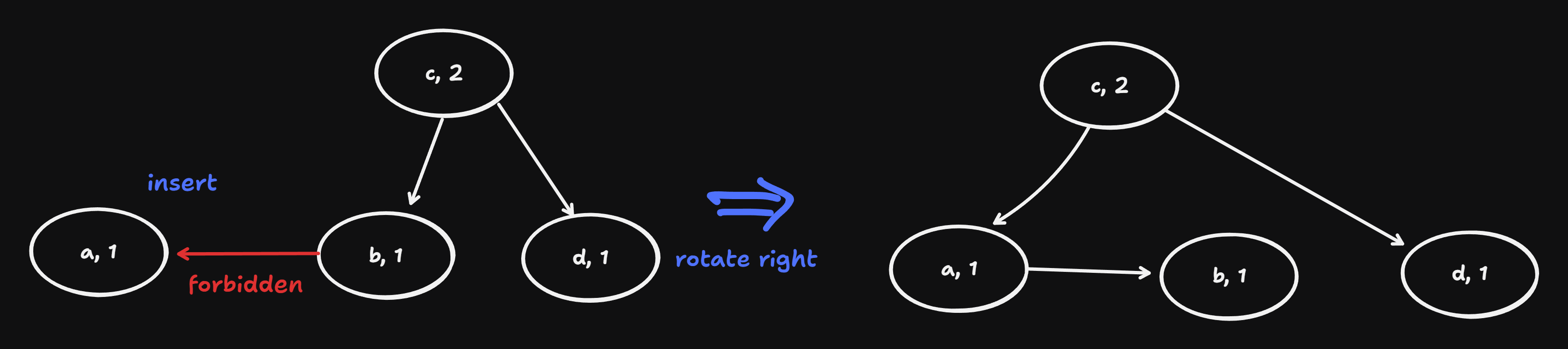
Last if of insert:
if node.right is not None and node.right.right is not None and \
node.dist == node.right.right.dist: #
node = rotate_left(node)
node.dist += 1 # this node has two children, because in hte midle of the chain in the treeConsequence for the depth:
- lowest level: k = k_min => N_min(k_min) = 1
- higher levels:
- Case 1: no horizontal edge: N_min(k) = 1 + 2 N_min(k - 1)
- Case 2: right horizontal edge: N_min(k) = 1 + N_min(k - 1) + 1 + 2 N_min(k - 1) = 2 + 3 N_min(k - 1)
Case 1 is corresponds exactly to the perfect tree, k = log_2(N + 1)
- Summary:
- k_max <= log_2(N + 1) always holds (k_max is the distance to the root)
- there are never two subsequent horizontal edges => d <= 2k_max
- \(\Rightarrow\) d <= 2 log_2(N + 1) (basically same complexity as a perfectly balanced tree).
Priority Search
- we search for a node with highest (max priority search) or lowest priority (min priority search) (not for a specific key)
- if we have max priority we can automatically can have a min priority searching by simply redefining the priority
- priority -> -priority
- priority -> 1 / priority
- applications:
- job queues on a machine or a cpu
- shortest paths in graphs
- heapsort
- stack (LIFO) and queue (FIFO): are special cases of priority queues / priority search:
waiting_time := now - arrive_time- \(\Rightarrow\) queue: max priority search with waiting_time
- \(\Rightarrow\) stack: min priority search with waiting_time
Simple Algorithms for finding the max Element
sequential search in an array a: finding the max element (same as inner loop of selection sort)
m = 0 for i in range(1, len(a)): if a[i] > a[m]: m = i return msorted array: m = len(a) - 1: O(1), but O(N log(N)) sorting expense. This is usually inefficient, becase many elements are dynamically coming and leaving the queue. This would require resorting
search tree:
node = root while node.right is not None: node = node.right return nodesame as
tree_predecessor(node.left)but we can do better! \(\Rightarrow\) Heap Data Structure
Heap Data Structure
finding the max element is O(log(N)) but the constant within are better, also heaps can be stored as arrays instead of linked nodes as with search trees, which makes it even faster in practice.
- Heap is a binary tree with two properties:
perfectly balanced and left-leaning (can be stored as an array)
heap-tree Heap-property: the root of every sub-tree has the highest priority in the sub-tree \(\Rightarrow\) largest element is the root of the whole tree.
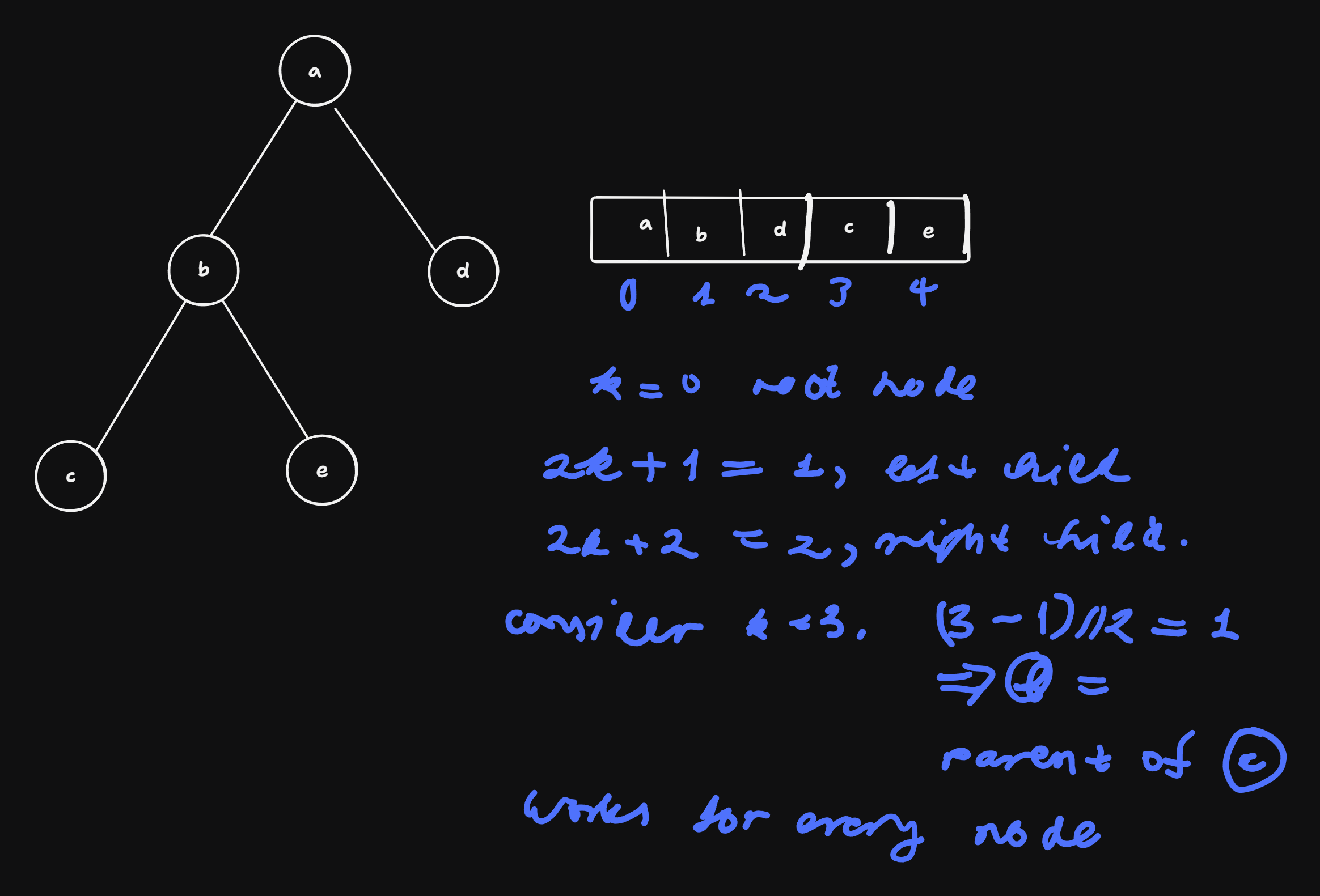
- flattening: representation of a left-leaning heap as array
- nodes are stored level-wise one after the other:
- child of k: 2k + 1 or 2k + 2
- parent of k: (k - 1) // 2
- nodes are stored level-wise one after the other:
Implementation of the Heap Data Structure
class Heap:
def __init__(self): self.data = []
def __len__(self): return len(self.data)
def top(self): return self.data[0]
def pop(self): # removes top
def push(self, priority) # insertbasic principle of insertion:
- new element is inserted at the end of
self.data. (this is efficient due to amortized O(1) complexity of heap) - swap elements until heap condition is satisfied again: O(log N)
- new element is inserted at the end of
implementation:
def push(self, priority): self.data.append(priority) # step 1 upheap(self.data, len(self.data) - 1) # step 2, len(self.data) - 1 is the index of the last element, that is possibly at wrong positionupheap()is what we must implementdef upheap(a, k): v = a[k] # intermediately store the element k, priority of k while True: # infinite loop, left with break if k == 0: # top node, can't go higher => break break parent = (k - 1) // 2 if a[parent] > v: # heap condition is satisfied break a[k] = a[parent] k = parent a[k] = v